環境: wnidows 10, STM32CubeIDE 1.8.0
開發板: stm32f407g
環境設定
參照 在 stm32f407g 使用 uart設置好 uart4。
接下來編輯 .ioc 檔案
- 將
PD12到PD15設為GPIO_Output,Label 設為led_green、led_orange、led_red、led_blue。
接下來設置好 FreeRTOS 的執行環境,因為網路很多教學,例如這篇,所以就不贅述。
Lab 目標
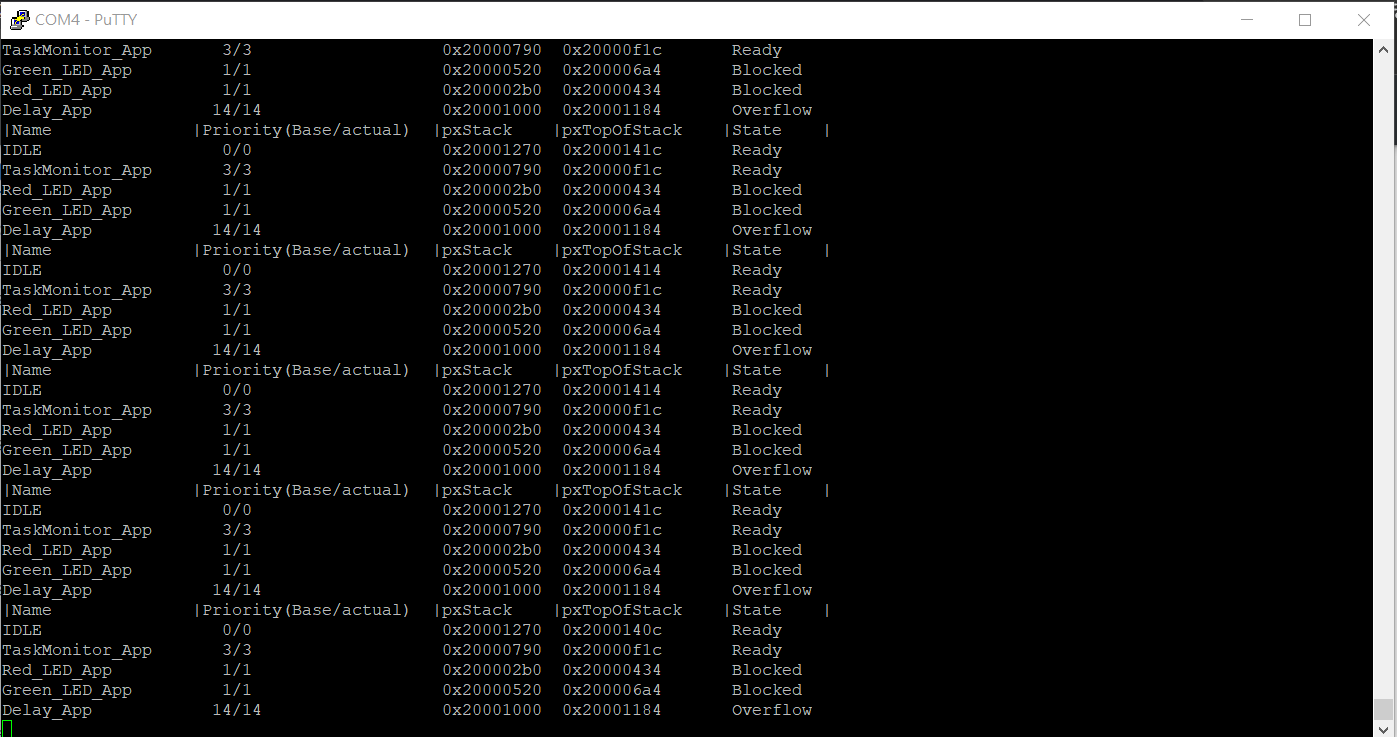
走訪 pxReadyTasksLists、pxDelayedTaskList、pxOverflowDelayedTaskList,並且透過 uart4 印出所有 task control block 的資訊。
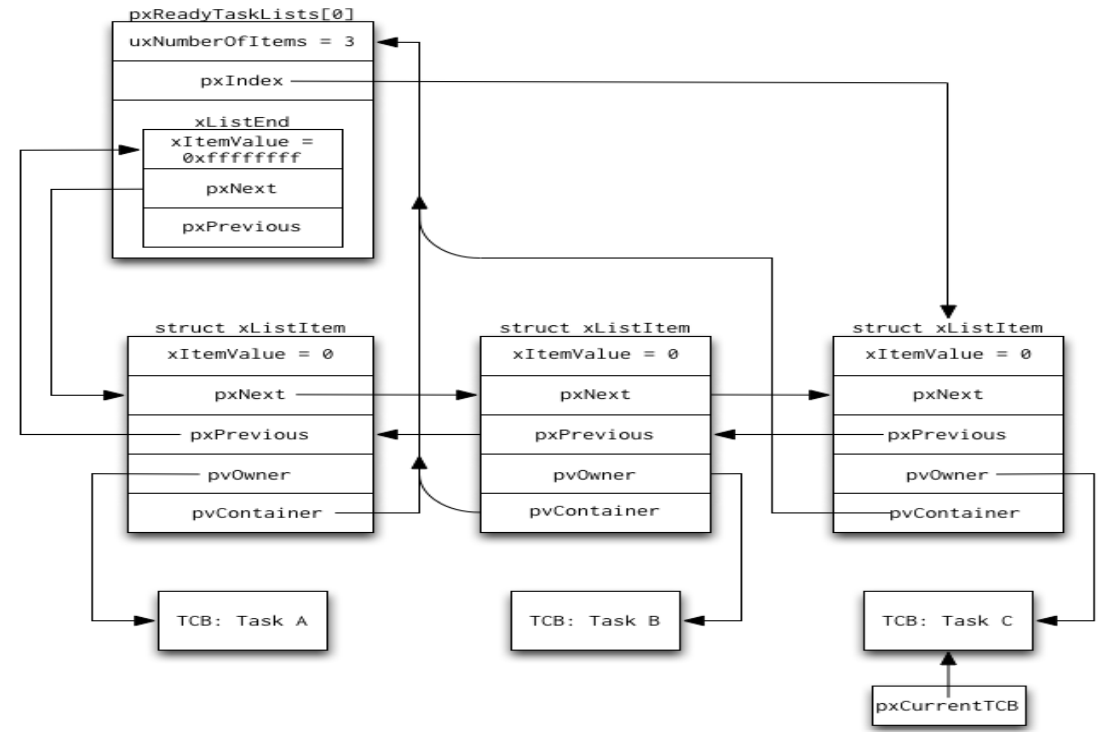
TaskList 的資料結構為 Linked List,示意圖如下:
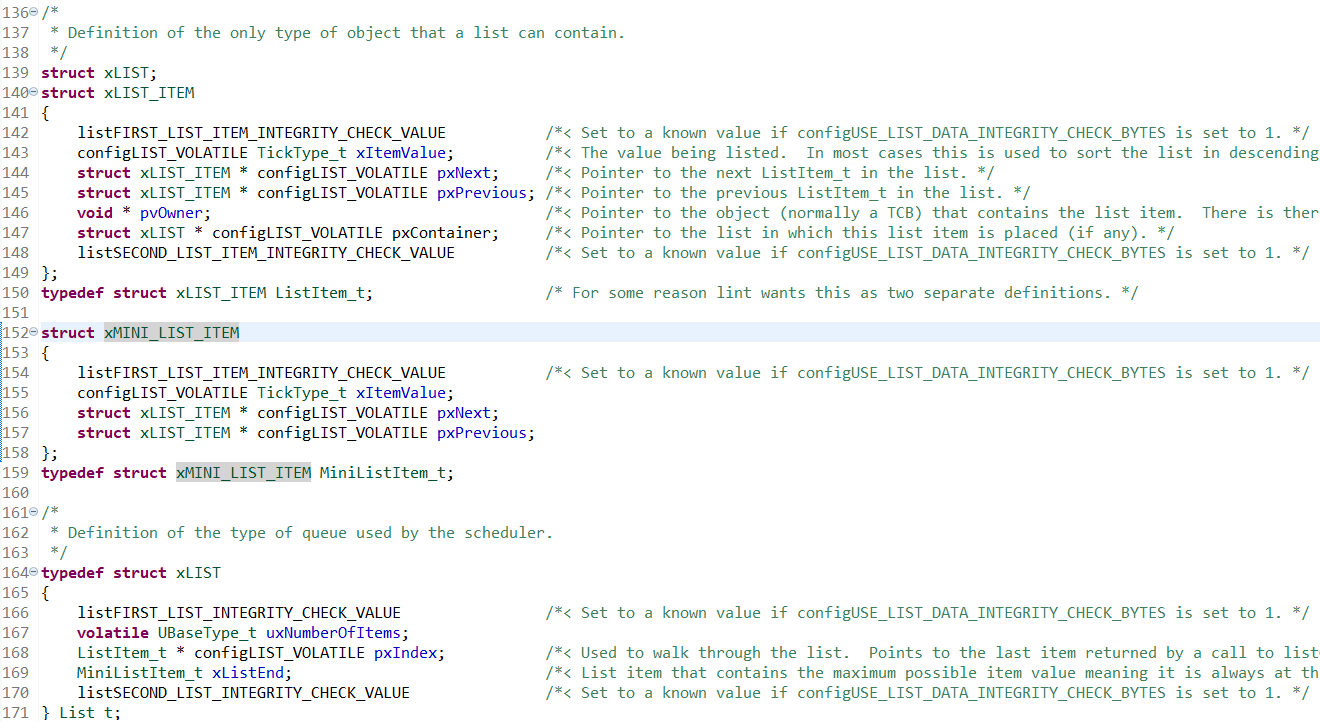
對應的宣告在 list.h:
Task Control Block 的資料結構宣告在 tasks.c 的 tskTaskControlBlock。
撰寫主程式
在 task.h 的最後面引入必要的函式庫,宣告 Taskmonitor() 作為印出 task control block 的資訊的函式:
1
2
3
4
5
#include "stm32f4xx_hal.h"
#include <string.h>
#include <stdio.h>
UART_HandleTypeDef huart4;
void Taskmonitor(void);
在 tasks.c 的最後面實作 Taskmonitor():
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
void print_pcb(tskTCB *t, char *state) {
char Monitor_data[130];
memset(Monitor_data,'\0',sizeof(Monitor_data));
sprintf(Monitor_data, "%-19s %3lu/%-19lu 0x%-9lx 0x%-14lx %s\n\r",
t->pcTaskName, t->uxPriority, t->uxBasePriority, t->pxStack, t->pxTopOfStack, state);
HAL_UART_Transmit(&huart4, (uint8_t *)Monitor_data, strlen(Monitor_data), HAL_MAX_DELAY);
}
void Taskmonitor(void)
{
/* Stop scheduler */
/* Taskmonitor() will block when UART is transmitting data */
vTaskSuspendAll();
/* Print title */
char *Monitor_data = "|Name |Priority(Base/actual) |pxStack |pxTopOfStack |State |\n\r";
HAL_UART_Transmit(&huart4, (uint8_t *)Monitor_data, strlen(Monitor_data), HAL_MAX_DELAY);
ListItem_t *node;
/* pxReadyTasksLists */
for (int i = 0; i < configMAX_PRIORITIES; i++) {
node = listGET_HEAD_ENTRY(pxReadyTasksLists + i);
for (uint32_t j = 0; j < listCURRENT_LIST_LENGTH(pxReadyTasksLists + i); j++) {
print_pcb(listGET_LIST_ITEM_OWNER(node), "Ready");
node = listGET_NEXT(node);
}
}
/* pxDelayedTaskList*/
node = listGET_HEAD_ENTRY(pxDelayedTaskList);
for (uint32_t j = 0; j < listCURRENT_LIST_LENGTH(pxDelayedTaskList); j++) {
print_pcb(listGET_LIST_ITEM_OWNER(node), "Blocked");
node = listGET_NEXT(node);
}
/* pxOverflowDelayedTaskList */
node = listGET_HEAD_ENTRY(pxOverflowDelayedTaskList);
for (uint32_t j = 0; j < listCURRENT_LIST_LENGTH(pxOverflowDelayedTaskList); j++) {
print_pcb(listGET_LIST_ITEM_OWNER(node), "Overflow");
node = listGET_NEXT(node);
}
/* Resume scheduler */
xTaskResumeAll();
}
編輯 Core/Src/main.c,引入標頭檔:
1
2
3
4
/* USER CODE BEGIN Includes */
#include "FreeRTOS.h"
#include "task.h"
/* USER CODE END Includes */
撰寫 Red_LED_App、Green_LED_App、Delay_App、TaskMonitor_App:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
/* USER CODE BEGIN 0 */
TaskHandle_t xHandle=NULL;
void Red_LED_App(void *pvParameters){
uint32_t Redtimer = 800;
for(;;){
HAL_GPIO_TogglePin(GPIOD, led_red_Pin);
vTaskDelay(Redtimer);
Redtimer+=1;
}
}
void Green_LED_App(void *pvParameters){
uint32_t Greentimer = 1000;
for(;;){
HAL_GPIO_TogglePin(GPIOD, led_green_Pin);
vTaskDelay(Greentimer);
Greentimer+=2;
}
}
void Delay_App(void *pvParameters){
int delayflag=0;
uint32_t delaytime;
while(1){
if(delayflag==0){
delaytime = 1000;
delayflag=1;
}else{
delaytime=0xFFFFFFFF;
}
vTaskDelay(delaytime);
}
}
void TaskMonitor_App(void *pvParameters){
for(;;){
Taskmonitor();
vTaskDelay(1000);
}
}
/* USER CODE END 0 */
最後在 main() 函式創建這四個 App 讓 FreeRTOS 排程,注意 TaskMonior_App 的 Stack Size 要夠大才夠 sprintf 處理字串:
1
2
3
4
5
6
7
/* USER CODE BEGIN 2 */
xTaskCreate(Red_LED_App, "Red_LED_App", 128, NULL, 1, &xHandle);
xTaskCreate(Green_LED_App, "Green_LED_App", 128, NULL, 1, &xHandle);
xTaskCreate(TaskMonitor_App, "TaskMonitor_App", 512, NULL, 3, &xHandle);
xTaskCreate(Delay_App, "Delay_App", 128, NULL, 14, &xHandle);
vTaskStartScheduler();
/* USER CODE END 2 */
Demo
